Group members: Nate Vack and Adrian Mayorga
For the good redesign we chose the Depth-Dependent Halos that I posted.
The mappings are:
Data
- A set of 3 dimensional poly-lines
Mapping
- Poly-lines are bundled together
- A camera view is chosen and a 2-d projection is performed. Depth information is also calculated
Encoding
- The bundles are drawn directly from the projection
- Discontinuities in depth are encoded by white lines (halos) that surround the bundles. Larger discontinuities yield larger halos.
Besides the halos, all of their mappings are pretty much the obvious ones, just a simple 3d to 2d projection. The halos intuitively encode differences in depth, almost in a sense hacking the perceptual system to convey 3d structure in a 2d image. Also, because they do not perform needless abstraction of the data, the context of the lines is not lost.
We have come up with the following alternates:
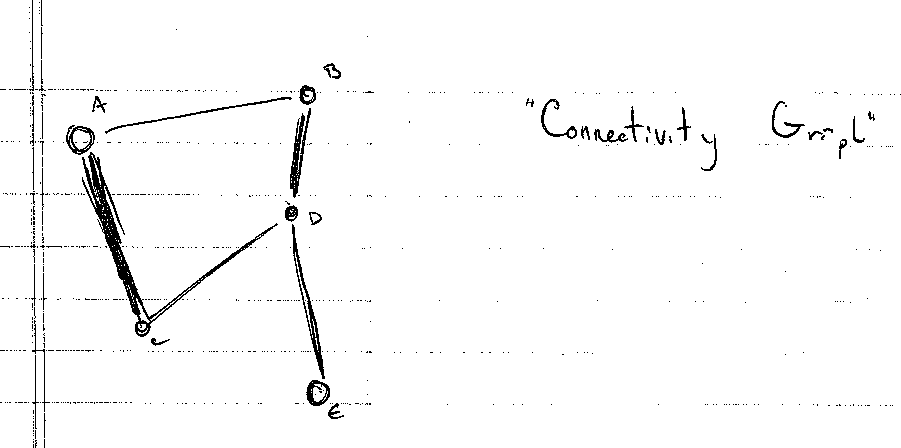
If annotations that label particular regions of the data are available, we could represent the connectivity explicitly with a node graph. Alternatively, if annotations are not available, more aggressive bundling can be performed.
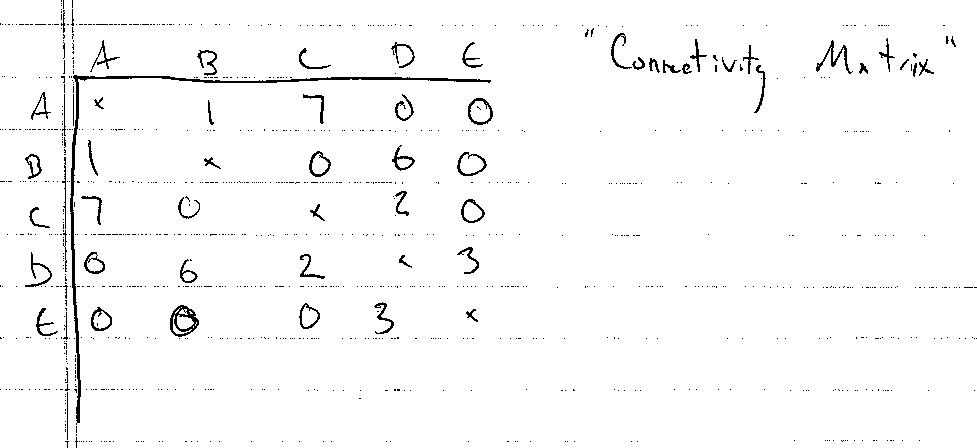
The same data can also be shown in a symmetric matrix
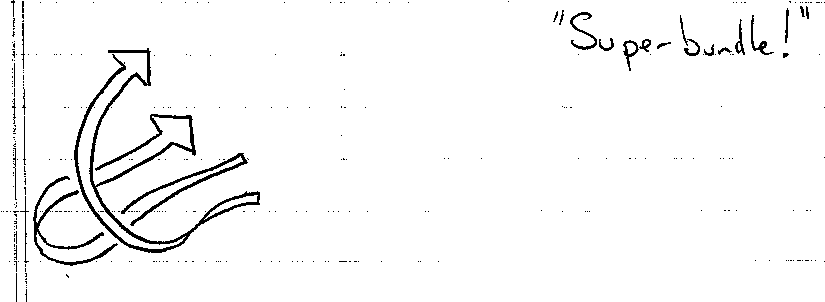
The bundles can also be drawn as ribbons or arrows. While this removes the visual context, connectivity is more explicitly conveyed
We can also change the way that depth is being encoded. If we instead use intensity, then closer areas would appear brighter, while the far away things would fade into the dark background, or vice-versa. With this mapping we lose the sharp delineation between relative depth discontinuities but it gives more information about absolute depths.